Soccer Droids
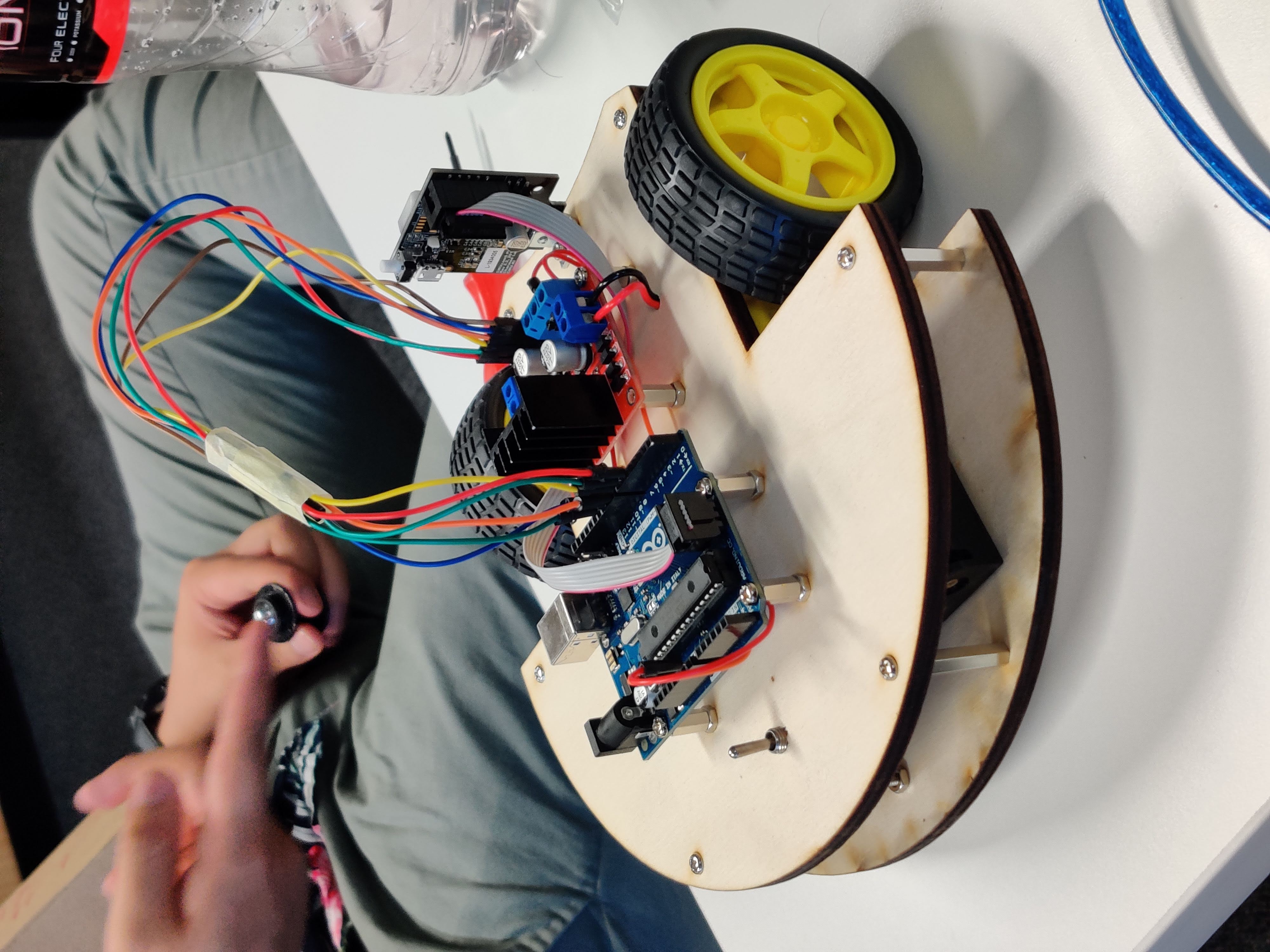
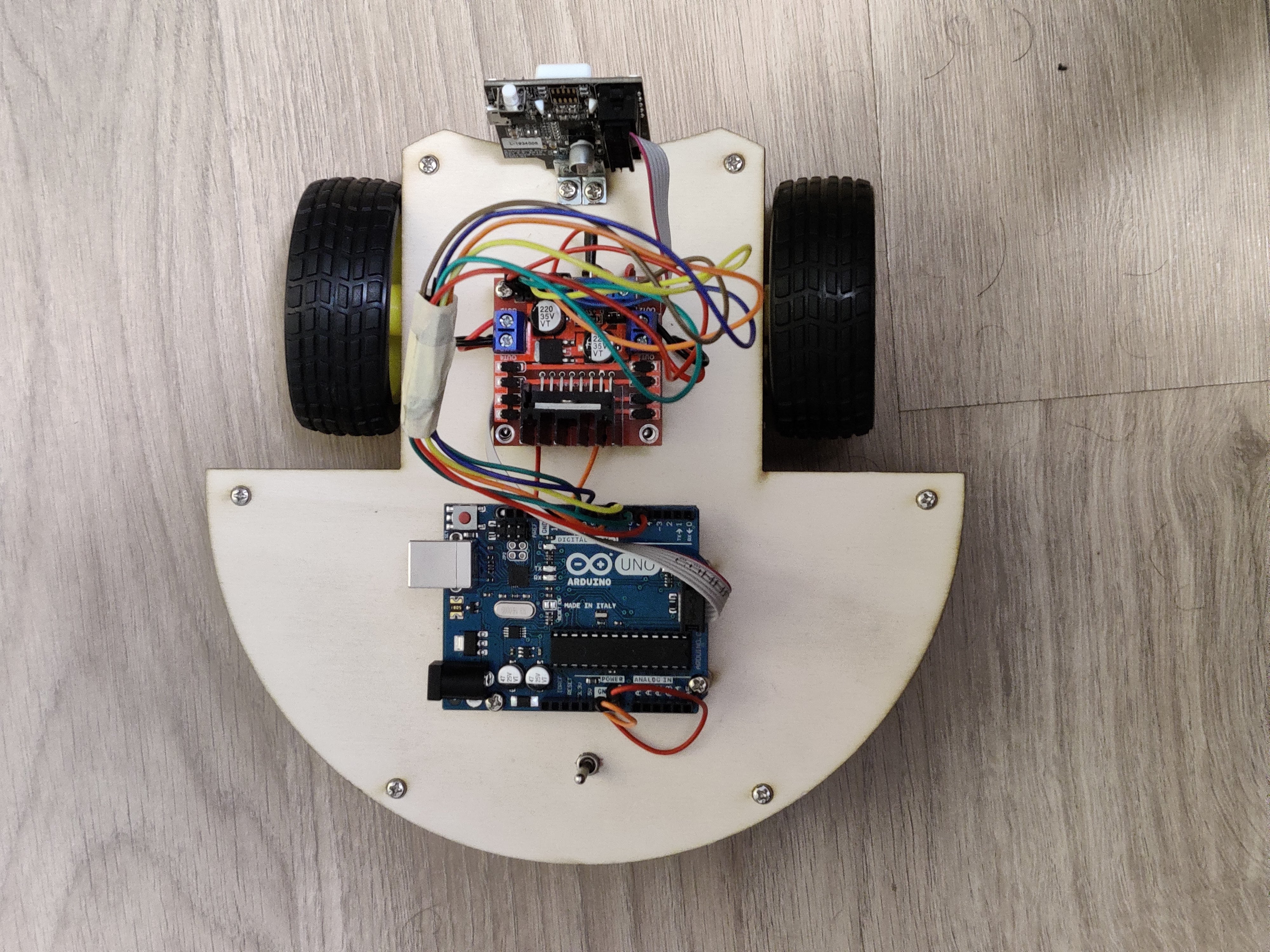
Developed an autonomous robot designed to play soccer in a controlled environment.
Programmed the Arduino-based control system responsible for movement, strategy, and real-time decision-making based on sensor input.
Integrated a Pixy2 Camera for visual object detection and tracking (ball and goal).
Involved hardware assembly, sensor integration, and algorithm development for autonomous navigation and gameplay.